


Detection and Adjustment of Gross Errors In Survey Data
-
摘要: 利用巴尔达传统粗差检验方法检验剔除出数据中的粗差,并通过稳健估计方法处理含有粗差的数据以及传统平差方法处理剔除过粗差的数据,与加入粗差前的数据处理结果作对比,比较不同粗差处理方法的优缺点。经比较得出:在保证一定迭代计算次数的条件下,稳健估计能够达到抵抗粗差的目的;巴尔达粗差探测在数据中只含有一个粗差的情况下,与稳健估计相比,在满足一定精度要求的前提下,更能保证计算效率;在数据含有多个粗差的情况下,可利用稳健估计方法进行处理。Abstract: Baarda's traditional gross error test method was used to test and eliminate the gross errors in the data. The data with gross errors were processed by robust estimation method and traditional adjustment method respectively, and the results were compared with those before adding gross errors. The advantages and disadvantages of different gross error processing methods were compared. It is concluded that under the condition of ensuring a certain number of iterative calculations, robust estimation can achieve the purpose of resisting gross errors. Compared with robust estimation, Baarda gross error detection can ensure the calculation efficiency on the premise of meeting certain accuracy requirements when there is only one gross error in the data. When the data contains multiple gross errors, the robust estimation method can be used for processing.
-
Key words:
- gross error /
- Baarda /
- selecting weight iteration /
- detection /
- survey data adjustment
-
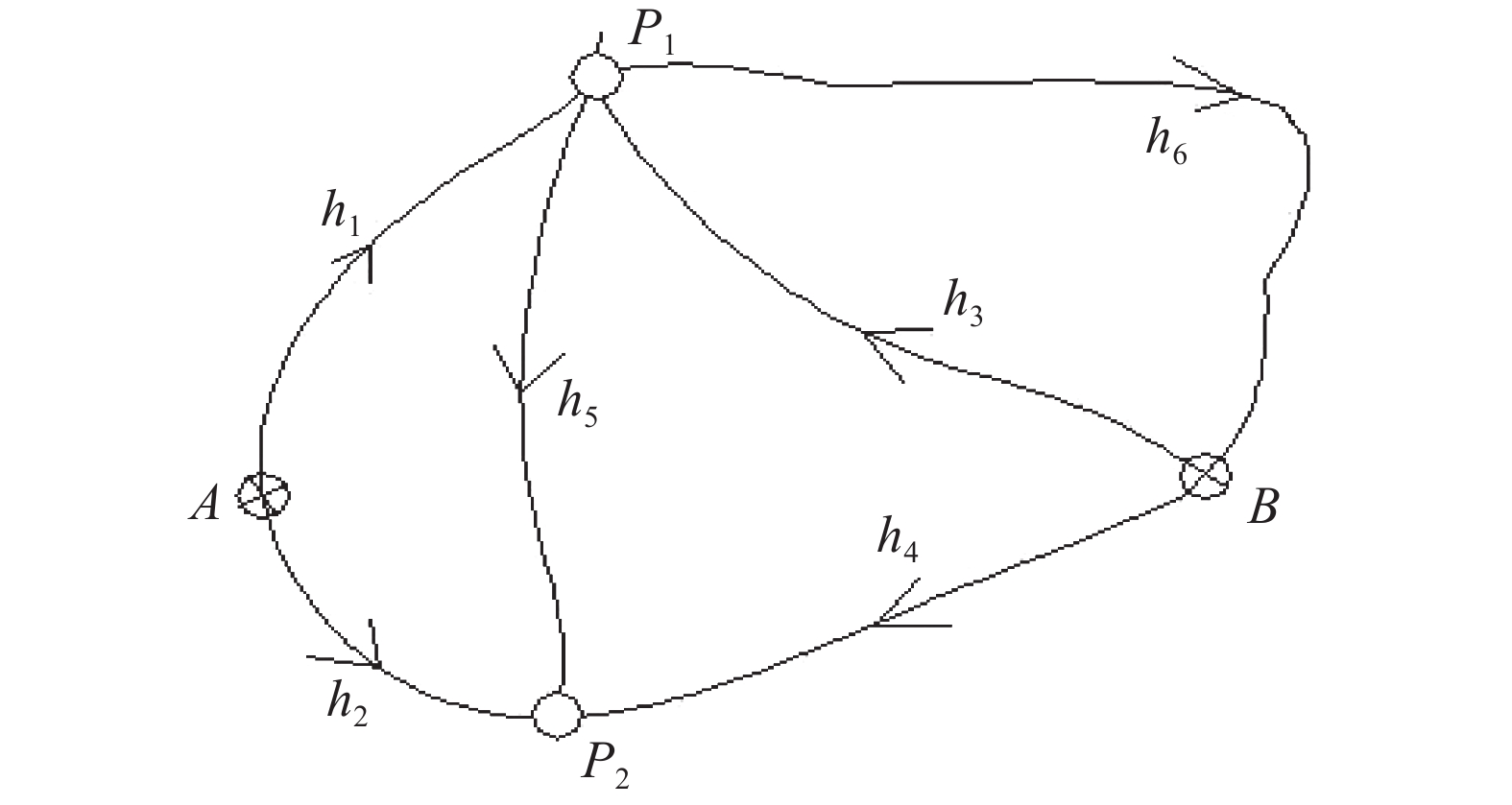
表 1 观测数值
测段编号 观测高差/m 线路长度/km 已知高程/m h1 +1.359 1.1 HA=5.016 h2 +2.209 1.7 HB=6.016 h3 +0.363 2.3 h4 +1.012 2.7 h5 +0.657 2.4 h6 −0.357 4.0  下载: 导出CSV
下载: 导出CSV
表 2 正态u结果
测段编号 改正数v/m 改正数方差 改正数中误差 正态u h1 0.018822 0.0035 0.059160798 0.318145 h2 −0.10583 0.0056 0.074833148 −1.41421 h3 0.014822 0.0108 0.103923048 0.142622 h4 0.09117 0.0117 0.108166538 0.842871 h5 0.068349 0.0086 0.092736185 0.737023 h6 −0.02082 0.0211 0.14525839 −0.14334
下载: 导出CSV
表 5 权因子迭代计算(h1—h3)
次数 路线 h1 h2 h3 w1 v1/mm w2 v2/mm w3 v3/mm 1 1 18.8217 1 −105.8296 1 14.82 2 0.053 5.349 0.009 −126.5299 0.067 1.3493 3 0.178 2.9735 0.008 −138.2333 0.741 −1.0265 4 0.336 2.4502 0.007 −149.9846 0.974 −1.5498 5 0.408 1.9086 0.007 −157.9085 0.645 −2.0914 … … … … … … 23 1.00E+10 0 0.005 −192.9972 0.25 −4 24 1.00E+10 0 0.005 −192.9987 0.25 −4 25 1.00E+10 0 0.005 −192.9994 0.25 −4 26 1.00E+10 0 0.005 −192.9997 0.25 −4 27 1.00E+10 0 0.005 −192.9999 0.25 −4
下载: 导出CSV
表 6 权因子迭代计算(h4—h6)
次数 路线 h4 h5 h6 w4 v4/mm w5 v5/mm w6 v6/mm 1 1 91.17 1 68.3487 1 −20.8217 2 0.011 70.4701 0.015 61.1208 0.048 −7.3493 3 0.014 58.7667 0.016 51.7931 0.136 −4.9735 4 0.017 47.0154 0.019 40.5652 0.201 −4.4502 5 0.021 39.0915 0.025 33.1829 0.225 −3.9086 … … … … … … 23 0.25 4.0028 166.7 0.0028 0.5 −2 24 0.25 4.0013 357.1 0.0013 0.5 −2 25 0.25 4.0006 769.2 0.0006 0.5 −2 26 0.25 4.0003 1667 0.0003 0.5 −2 27 0.25 4.0001 3333 0.0001 0.5 −2
下载: 导出CSV
表 7 平差结果
观测值 权因子 改正数v/mm 平差结果Li/mm h1 1.00E+10 0 1359 h2 0.005 −192.9999 2016.0001 h3 0.25 −4 359 h4 0.25 4.0001 1016.0001 h5 3333 0.0001 657.0001 h6 0.5 −2 −359
下载: 导出CSV
表 9 平差结果
点号 高差改
正数/m改正后
高差/m高程中
误差/m平差后
高程/m备注 A 0.0000 5.0160 已知点 P1 −0.0007 1.3583 0.0015 6.3743 A 0.0000 5.0160 已知点 P2 0.0027 2.0117 0.0018 7.0277 B 0.0000 6.0160 已知点 P1 −0.0047 0.3583 0.0015 6.3743 B 0.0000 6.0160 已知点 P2 −0.0003 1.0117 0.0018 7.0277 P1 0.0015 6.3743 P2 −0.0036 0.6534 0.0018 7.0277 P1 0.0015 6.3743 B −0.0013 −0.3583 0.0000 6.0160 已知点
下载: 导出CSV
表 10 平差结果
点号 高差改
正数/m改正后
高差/m高程中
误差/m平差后
高程/m备注 A 0.0000 5.0160 已知点 P1 0.0001 1.3591 0.0014 6.3751 B 0.0000 6.0160 已知点 P1 −0.0039 0.3591 0.0014 6.3751 B 0.0000 6.0160 已知点 P2 0.0028 1.0148 0.0024 7.0308 P1 0.0014 6.3751 P2 −0.0013 0.6557 0.0024 7.0308 P1 0.0014 6.3751 B −0.0021 −0.3591 0.0000 6.0160 已知点
下载: 导出CSV
表 11 平差结果
点号 高差改
正数/m改正后
高差/m高程中
误差/m平差后
高程/m备注 A 0.0000 5.0160 已知点 P1 0.0000 1.3590 0.0000 6.3750 A 0.0000 5.0160 已知点 P2 0.0000 2.0160 0.0000 7.0320 B 0.0000 6.0160 已知点 P1 0.0000 0.3590 0.0000 6.3750 B 0.0000 6.0160 已知点 P2 0.0000 1.0160 0.0000 7.0320 P1 0.0000 6.3750 P2 0.0000 0.6570 0.0000 7.0320 P1 0.0000 6.3750 B 0.0000 −0.3590 0.0000 6.0160 已知点
下载: 导出CSV
-
[1] 王仁谦. 一种多个粗差的定位与估值的方法[J]. 华侨大学学报, 2004, 25(2): 153-155. [2] 佘光辉,刘恩斌. 非线性模型抗差最小二乘估计及其应用[J]. 南京林业大学学报,2005,29(3):9-13. [3] 李德仁. 利用选择权迭代法进行粗差定位[J]. 武汉测绘学院学报,1984,(1):47-68. [4] 周江文. 经典误差理论与抗差估计[J]. 测绘学报,1989,18(2):116-120. [5] 杨元喜. 大地测量相关观测抗差估计理论[J]. 测绘学报,2002,31(2):96-99. [6] 杨元喜. 卫星精密轨道综合自适应抗差滤波技术[J]. 中国科学(D辑),2003,33(11):1113-1119. [7] 朱建军. 一种稳健性准则及相应的稳健估计[J]. 测绘工程,1996,5(4):23-27. [8] 朱建军. 一种可靠的小波去噪质量评价指标[J]. 武汉大学学报(信息科学版),2015,40(2):210-212. [9] 朱建军. 附不等式约束平差的一种简单迭代算法[J]. 测绘学报,2011,40(2):210-212. [10] 孙海燕. P-范分布及其抽样分布[J]. 应用概率统计,2003,19(4):425-428. [11] 孙海燕. 一元P-范分布的参数估计[J]. 武汉大学学报(信息科学版),2003,28(5):552-554. [12] 王新洲. 方差分量估计的快速算法[J]. 武测科技,1994,(2):18-22. [13] 王新洲, 陶本藻. 高等测量平差[M]. 北京: 测绘出版社, 2006. [14] 归庆明. 双k型岭估计及其在GPS快速定位中的应用[J]. 测绘科学技术学报,2006,23(1):9-10. [15] 欧吉坤. 一种检测粗差的新方法—拟准检定法[J]. 科学通报,1999,44(16):99-103. [16] 彭军还. L1范估计的巴尔达型检验及其可靠性[J]. 测绘学报,2005,34(3):208-212. doi: 10.3321/j.issn:1001-1595.2005.03.004 -

图(1) / 表(12)
计量
- 文章访问数: 354
- HTML全文浏览量: 82
- PDF下载量: 47
- 被引次数: 0
